![]() Recently, press reports in the UK recounted a scenario whereby vehicles with ADAS were being confused by a cattle grid (a metal grate in the road surface to prevent cattle crossing). The grid was cut into a steep section of road, and due to the contrast in gradient between the grid and road, ADAS were identifying it as a wall and thus applying emergency braking. Ultimately, the local council in the area performed £70,000 (US$95,000) of remedial work to reprofile the section of road in question. Kia Cammaerts, director of simulation specialist Ansible Motion, writes that this is precisely the sort of scenario that may not be experienced over thousands of miles of physical driving but can be accounted for in simulation.
Recently, press reports in the UK recounted a scenario whereby vehicles with ADAS were being confused by a cattle grid (a metal grate in the road surface to prevent cattle crossing). The grid was cut into a steep section of road, and due to the contrast in gradient between the grid and road, ADAS were identifying it as a wall and thus applying emergency braking. Ultimately, the local council in the area performed £70,000 (US$95,000) of remedial work to reprofile the section of road in question. Kia Cammaerts, director of simulation specialist Ansible Motion, writes that this is precisely the sort of scenario that may not be experienced over thousands of miles of physical driving but can be accounted for in simulation.
The rising use of advanced driver assistance systems (ADAS) presents a substantial challenge for the verification and testing of today’s cars and as we have seen, despite rigorous test programs, the rising complexity of cars requires the development processes to change to accommodate the diverse range of situations drivers now face.
Perhaps more so than any other aspect, it’s where the actions of a machine and a human driver become entwined that impacts both safety and the customer experience. This means human beings are a vital part of the test and verification process for vehicles with ADAS content. If you think about all the possible scenarios that might be presented to a collision avoidance system, for instance a cattle grid, it’s easy to see how you can get hundreds of thousands of combinations that would require testing. It’s just not possible to do all of these in the real world. That’s why virtual testing using a simulator can play a role and having a driver-in-the-loop, to identify what is a cattle grid and what is a wall and calibrate the sensors, makes a real difference to the performance of a car in the real world.
The specific cattle grid scenario was a situation in which a combination of offline and DIL (driver-in-the-loop) simulation could have been used to find the problem. More importantly, having identified this particular failure mode, these two types of simulation should be used to study this and all other similar failure points in order to eliminate not just “cattle grid appears as wall” but also the fundamental problem of correctly identifying discontinuities in the gradient and texture of the road surface. Using simulation means that potential issues such as this can be identified early on, when they are less costly to address, at a time when physical prototypes might not even be available.
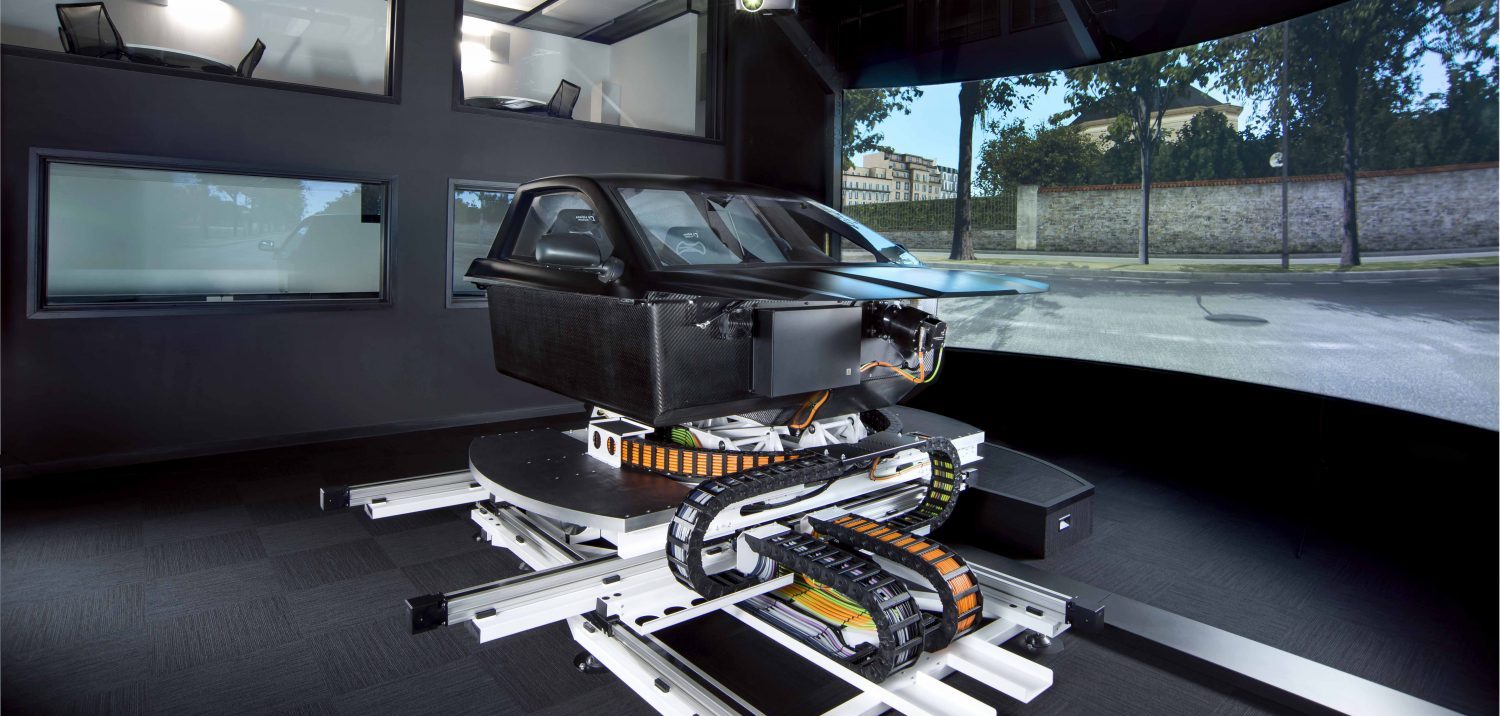
With simulators such as ours, we use extremely accurate representations of real-world locations, including lidar scans and physically modeled surfaces and materials. Sensor simulation can even include real radar signatures presented to a real sensor (via hardware-in-the-loop) working synchronously with a real driver in a DIL lab, rather than relying on remote coders or cardboard cutouts.
Read the article on Autonomous Vehicle International.