![]() With the Formula E season underway, energy management is a key battlefield between teams. With the powertrains already in the 98% efficiency region, the team best able to manage its energy consumption during a race, and account for unpredictable events such as safety cars, will gain the upper hand. With energy allowance varying from race to race, the ability to adapt strategies on the fly is indispensable.
With the Formula E season underway, energy management is a key battlefield between teams. With the powertrains already in the 98% efficiency region, the team best able to manage its energy consumption during a race, and account for unpredictable events such as safety cars, will gain the upper hand. With energy allowance varying from race to race, the ability to adapt strategies on the fly is indispensable.
All teams rely heavily on simulation and modeling for calculating optimum energy consumption; how to go as fast as possible, as efficiently as possible. In addition to the various predictive models each develop in-house, fed by on track data from testing (telemetry is not permitted in races) and rig testing, driver-in-the-loop (DIL) simulation has become an invaluable tool.
Beyond the use of DIL to help drivers learn a track, they are an indispensable input for energy use models, enabling both race and dedicated simulator drivers to run through different lines and race scenarios.
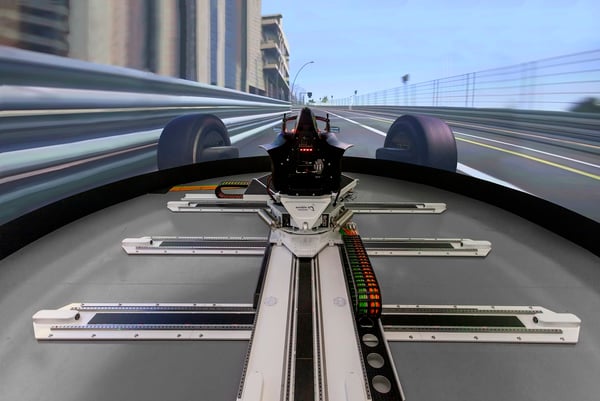
Several teams are already using full-motion DILs such as Ansible Motion’s Delta S3 (illustrated), and it is not only pre-race weekend that these tools are being employed. It is possible to execute DIL runs over a race weekend, as the trackside team’s understanding of a given circuit develops. This in turn enables a team’s engineers to better refine their real-time models which inform energy strategy, with these models running on both the pitwall and on-car.
Full motion simulators provide a significant step up in capability compared to static sims, creating higher fidelity inputs for the aforementioned models. In the case of the Delta S3, it is capable of accurately reproducing the FE environment, thanks to its 360° yaw capability with 48K wrap-around screen, 16m2 (or beyond) motion space, and its fully integrated Formula E cockpit environments. Ansible Motion's technical director, Kia Cammaerts, notes:
Of particular interest to the drivers seeking ultra-low latency immersion is the Delta S3’s ability to replicate highly dynamic maneuvers in real time and the nuances of the sensitive inputs that characterize the category’s chassis.
The driver is just one element of this equation, and it is vital that any DIL provides seamless connection for a team’s hardware and software. Hence Ansible Motion ensuring that sufficient configurable inputs and outputs are available to accommodate onboard ECUs for hardware- and software-in-the-loop testing, with eight CANbus networks available. This, suggests Cammaerts, is an essential ingredient that makes validation of torque maps and the electro-mechanical driver controls possible in the simulation environment.
By having a joined-up toolchain, DIL, scanning capabilities and simulation environment, track changes can be integrated into the DIL simulator in as little as 30 minutes. The result is that, with the right test rigs available, a team can run a car through a full race distance with the driver providing inputs that drive the car on a full-chassis dyno. This not only gets as close as possible to running on track from an energy use perspective, but also enables accurate assessment of vital thermal management systems and strategies. Cammaerts continues:
The human-vehicle interaction, whether that’s trackside or back at base, is the cornerstone of performance optimization and we see this as a real differentiator in electric racing categories.
Read the full article at Professional Motorsports World