Vehicle dynamicists often speak of the degrees of freedom (DOF) in a vehicle model – meaning the logical number of independent motions that can be calculated. A simple, lumped-parameter vehicle acceleration performance model might have just 2 degrees of freedom: perhaps it’s engine rotation and longitudinal displacement of the vehicle mass. A complex multi-body vehicle ride and handling model might have over 400 degrees of freedom: tracking the displacements and rotations of not only the vehicle’s mass, but also a large number of parts – individual suspension and subframe components, various bushings and mounts, steering assemblies, flexible chassis subsystems and so on.
Is there an ideal number of degrees of freedom for a vehicle model? Not really. It depends on the model’s intent, on how it is meant to be exercised and interrogated.
Since one of our specialties at Ansible Motion is the design of Driver-in-the-Loop (DIL) simulators, we are often asked about how many degrees of freedom our full-motion, dynamic simulators have. Vehicle dynamicists – especially those engaged in multi-body vehicle modelling – might expect us to report a large number that corresponds with the large DOF count in their sophisticated vehicle models. But this isn’t the case.
Driving Simulator Degrees of Freedom
Interestingly, dynamic DIL simulators are not aimed at replicating the hundreds of independent motions that might be present in a real vehicle (or detailed vehicle model). Instead, DIL simulators are aimed at delivering an amalgamation of all those motions – just as a real car does – such that they can be sensed and interpreted by a human.
It’s for this reason that the primary motion system of a dynamic DIL simulator need only have 6 motion degrees of freedom. This provides all necessary primary motion cues to a human driver/occupant. Added to that are perhaps 3 to 6 DOF for the foot pedals and the steering wheel, and perhaps a few additional, supplemental motion DOFs – such as seat cueing, seatbelt loading systems, and other devices. But overall, the total DOF count for a dynamic DIL simulator is rather small when compared to any multi-body vehicle model.
Driving Simulator Motor Count
As a corollary, motor count – as in the quantity of motors used in the design of a DIL simulator’s primary motion system – has no bearing on the performance of a dynamic driving simulator's motion system. It’s not quantity that matters. It’s quality.
It is possible to say that if a DIL simulator motion system has less than six motors, it must have less than six motion degrees of freedom, and therefore a reduced ability to provide vehicle motion cues to a human driver/occupant. It is also true that if a DIL simulator motion system has more than six motors, it indicates that the simulator's mechanical design is more complex and expensive than the minimum requirement.
That said, there can be some practical reasons to have more than six motors in a DIL simulator’s primary motion system. For example, sometimes it might be advantageous to use multiple motors in parallel to drive a single motion axis DOF in order to meet mechanical packaging or axis thrust requirements. So, from a mechanical design perspective, using more than six motors total is not necessarily incorrect or inefficient. It’s worth noting that motors used in series to drive a single motion axis DOF are more difficult to justify (and more difficult to command with control logic).
Driving Simulators and Multi-Body Vehicle Models
A logical question might arise: If a DIL simulator’s primary motion system is 6-DOF, does that somehow limit the simulator’s ability to interact with a 400-DOF multi-body vehicle model? The answer is no, not at all.
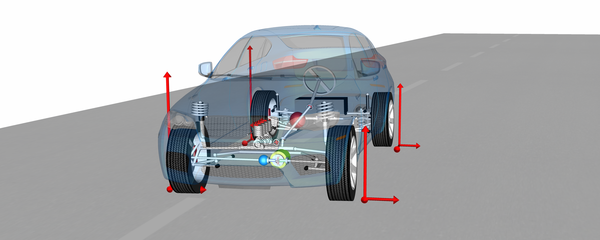
The logic of this is straightforward: Imagine the full kinematic chain of motions in a vehicle contributing to a human’s sensory perception of, say, vertical movement. Roadway inputs resolve through the tires, all the suspension components, the chassis, the seat, and so on. Other inputs are present as well – such as powertrain vibrations and aerodynamic disturbances.
From the human’s sensory perspective, all of these various vertical inputs are superimposed into a single vertical motion profile that can conceivably be reproduced by a single vertical DOF actuator in a driving simulator – provided that such an actuator is responsive enough and capable from a performance perspective, and provided it is being commanded properly by the representative vehicle physics model.
Ansible Motion Stratiform Motion System
Among the 6 motion DOF (or motion axes) in driving simulators for ground vehicles, 3 axes correspond directly to driver controls and should therefore be independent of each other and have zero motion control redundancies: X (surge) axis - which must be extremely responsive to brake and throttle; and the Yaw and Y (sway) axes - which must be extremely responsive to steering.
Driving simulators with more than 6 motion DOF must surrender direct control of these three important axes, instead relying on indirect or iterative motion control schemes. For example, if multiple simulator motion axes (and motors) need to be controlled in order to produce a simple motion in the X (surge) degree of freedom, then that simulator's motion will be indirectly connected to a driver's brake and throttle inputs.

Ansible Motion's Stratiform Motion System (SMS) is designed to provide truly independent motion control for each of the Y (sway), X (surge), and Yaw axes, with a single, dedicated motion DOF assigned to each (and single, dedicated motion DOFs assigned to the remaining 3 axes as well). For example, in its standard configuration, the Stratiform 3 (S3) motion system is a 6-DOF machine that uses a total of 9 motors – 3 in parallel for Y (sway); 2 in parallel for X (surge); 1 for Yaw; and 3 for Heave, Pitch, and Roll.
By adhering to automotive engineering first principles, our patented SMS architecture in all its historical configurations – S1, S2, S2e, S3, S3h – has been designed to strike a balance between mechanical efficiency, performance and cost. Our SMS remains unique in the marketplace, and we are delighted to see it being used by so many top OEMs, research organisations and motorsports teams to help them evaluate their new vehicles, concepts, components, active safety systems and more.
Ansible Motion’s DIL simulators are deployed around the world for ground vehicle development work. To learn more about our unique approaches and technologies, download our FREE eBook, “Better by design: 10 Advantages of Ansible Motion DIL Simulators”.