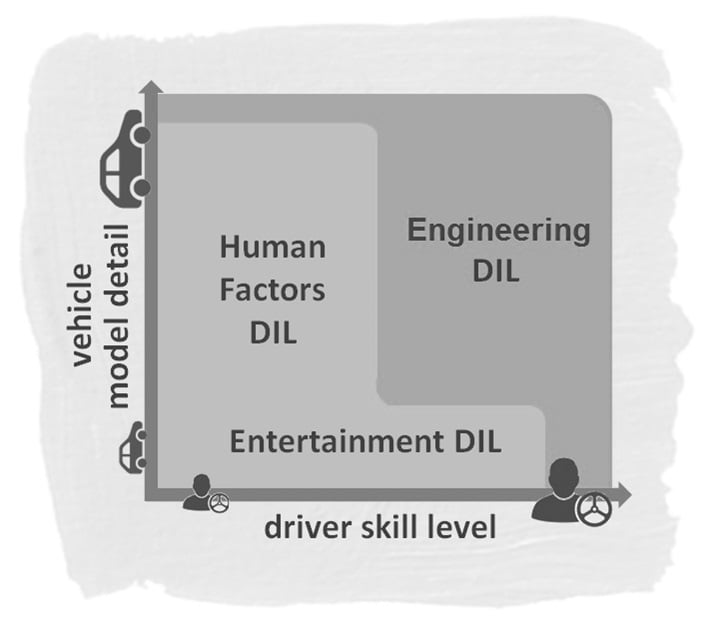
At the heart of any engineering class Driver-in-the-Loop (DIL) simulator is a vehicle physics model, a mathematical representation of the systems of the driven car.
Different DIL experiments often require different types of vehicle models. Sometimes this is due to the desire for computational efficiency – i.e. Real-time calculation resources can be allocated to the vehicle subsystem that is of interest for the particular DIL experiment. For example, a detailed multi-body steering system model will benefit a DIL experiment where settings for an Electric Power Assisted Steering (EPAS) system are explored, but the vehicle’s drivetrain may require nothing more than a lumped parameter representation for this work.
It is often asserted that the most important aspect of any vehicle model that is used in a DIL simulation is the tire model. There is something to this. After all, one hundred percent of a driver's intended vehicle control forces are acting through the tires, and a significant portion of a driver’s sensory feedback is delivered by the same. But just as is the case with vehicle models themselves, and for the same reasons, different DIL experiments often require different types of tire models. For example, a simulator tire model that is useful for simulating vehicle handling characteristics may not be capable of providing ride or harshness feedback.
Basic Simulator Tire Models
The go-to mathematical representation of a tire for off-line and DIL simulations, in terms of calculating a tire’s control force generation is the Magic Formula Tire (MF-Tire). Sometimes called the “Pacejka Model” after one of its developers, Hans Pacejka [Egbert Bakker and Lars Nyborg were actually the lead authors in the paper that introduced this tire modelling method in 1987], this formulation is called the “magic formula” because there is no physical basis for the mathematical equations used to fit the general shape of tire force generation curves and characteristics. Although this modelling approach is ubiquitous, and is often the starting point for DIL simulator programs (and the associated vehicle modelling), it is limited to vehicle handling simulations not exceeding ~ 8 Hz on smooth surfaces. As an example, if DIL experiments for damper tuning are of interest, different tire modelling approaches may be required.
Thermo-mechanical Tire Models
In the last decade, new formulations for tire control force generation have been introduced. Sometimes called simply “thermal models” these tire performance formulations are more than just tire temperature predictors – These models are typically derived from first principals, and are aimed at calculating tire forces (which are indeed related to temperature) based on the excitation content in the tire contact patch. This approach necessitates detailed mapping of the road surfaces on which the vehicle is driven, which, if the fidelity is appropriate, can sometimes be derived from the same LiDAR scanning data sets that produce information for DIL graphics. Although this modelling approach originated in top-level motorsports, it is now making its way into road car DIL simulation programs since it is useful for vehicle simulations of events such as transient handling/maneuvering and limit performance.
Ride Tire Models
Although a driver’s vehicle control inputs (voluntary movements of the hands and feet) are limited to 5-7 Hz, some DIL experiments require driver sensory feedback that far exceeds this level. For such experiments there are yet other tire models that can be deployed. For example, the Short Wavelength Intermediate Frequency Tire (MF-Swift) is an extension of MF-Tire that can include rigid ring dynamics to describe the frequency response of a tire carcass and a road irregularity envelopment model for the tire contact patch. Such a model might be used for ride simulations up to ~ 90 Hz or in experiments where road loads and vibrations are of interest - such as EPAS or other control system tuning. There are also special formulations of the Flexible Structure Tire Model (FTire) that can run in real time, but these are still under development at the time of writing.
Getting Traction...
The point of all this is not to overwhelm, but rather to state that since the tire is such an important component of a car, it always deserves some special attention. There are different tire modelling approaches for different applications, and it behooves anyone who is conducting DIL experiments to have sight of all the possibilities – and (hopefully) make full use of their DIL simulator’s performance capabilities. Ah, but this tempts me to digress into whether or not certain DIL simulators are up to the task – and of course that is an entirely different topic!
If you wish to learn more about the advantages of engineering-class driving simulators, download our FREE eBook, Looking down the road: Harnessing the benefits of driving simulator technology: