There is no question that one of the biggest challenges for ground vehicle Driver-in-the-Loop (DIL) simulation in the area of vehicle dynamics is reducing system latencies down to an acceptable level. Since even minuscule delays and inconsistencies between driver actions and inertial, visual and other feedbacks are readily sensed by the driver, improperly executed DIL simulations can cause lackluster driving experiences, and sometimes even cause motion sickness.
But what exactly is meant by the term “latency?” This term need not remain an impenetrable catch-all when it comes to DIL simulators. Latency is simply the time domain comparison of various command and response signatures within a simulator system. For example, if a vehicle physics calculation serves as the command for handwheel torque, latency would be the measured time delay between this command and the measured torque in the physical driver feedback system. This obviously cannot be zero, but it does need to be extremely low, clocked in milliseconds, in order for a skilled driver to accept it.
In the realm of vehicle dynamics (primary ride and handling, etc.) minimized latency is required to connect actions and consequences, to actually close the real-time simulation loop on the human driver. We can dissect the achievement of vehicle dynamics class latency into three distinct challenges:
Mechanical Latency – Vehicle dynamics work requires simulator motion systems that are themselves highly dynamic and responsive. Due primarily to mass, friction and applied control schemes, the traditional machinery that is useful for aircraft simulators has inherently too much "mechanical lag" for some classes of dynamic automotive situations, so other solutions are typically sought out.
Visual Latency – Most of the visual references required for vehicle dynamics work consists of scenery for virtual proving grounds and test courses, made up of ground and lateral objects in the near and medium fields of vision. Such objects must be rendered more quickly and correctly than would be the case for long field-of-vision objects such as the air-to-ground references in flight simulators. As a result, vehicle dynamics DIL simulation requires specialised image generation technologies in order to reduce “visual lag,”
Synchronicity -- A vehicle driver attempting to make a hard left or right turn expects to feel the change in trajectory and see the change in trajectory in certain ways. If the human mind has trouble reconciling any perceptual differences that violate these expectations it can induce motion sickness. So the aforementioned mechanical and visual performance levels must be properly integrated and synchronized from a system perspective, even if each one is acceptable in a stand-alone sense.
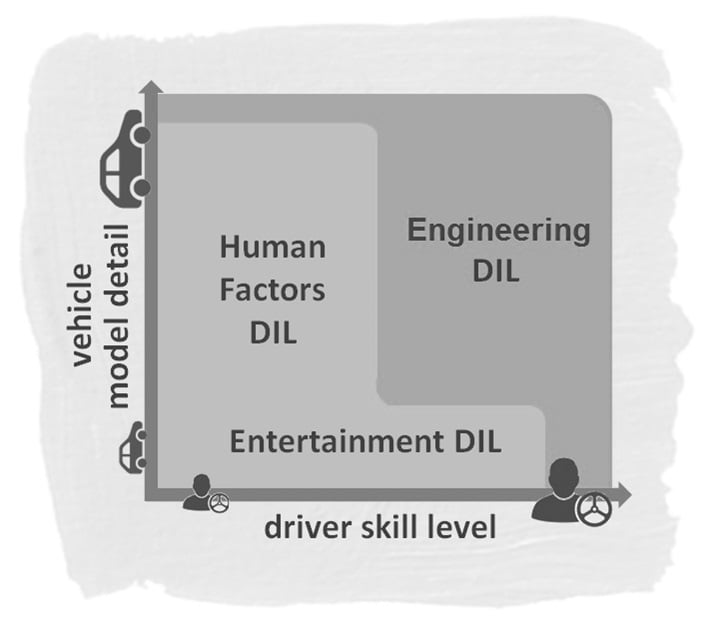
Of course, the ultimate goal is to have skilled drivers convincingly immersed and interacting with appropriately detailed vehicle physics models in vehicle dynamics scenarios.Luckily, there is an emerging class of next-generation automotive DIL simulators that is capable of delivering the correct levels of performance. These new driving simulators enable real-time sensory feedback free from the system latencies that can cause motion sickness and inhibit subjective and objective measurements.
To learn more about how to test handling effects on automobile drivers and the advantages of high-performance, low-latency driving simulation, download our FREE eBook, Looking down the road: Harnessing the benefits of driving simulator technology: