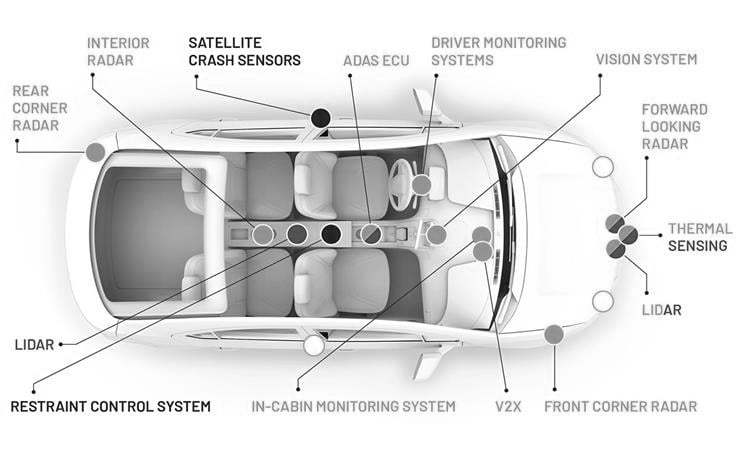
The process of designing and testing automobiles and their components has grown exponentially complex and expensive as fundamental vehicle sub-systems such as powertrain, steering, and braking systems have evolved from purely mechanical implementations into sophisticated electromechanical ones. Today, the simulation tools that are used to model and analyse automobiles are equally complex and costly.. This is particularly true in the case of driving simulators where human drivers are interacting in real time with sophisticated virtual reality models. So what might be the cost of a modern driving simulator?
The short answer is “a significant amount.” A traditional dynamic driving simulator built around a hexapod motion system can cost millions of pounds – serious systems will cost between one and three million pounds, and it goes (staggeringly) upwards from there, into tens or even hundreds of millions. You can attribute much of that to the intricate motion systems and the powerful computing systems needed to create those actions convincingly, in a professional, engineering-class manner that emulates a lifelike driving experience.
It's hard to provide a direct answer to the automotive driving simulator cost question, because there is such a wide range of functionality between different types of driving simulators. A more pointed question to ask is perhaps this: "What return-on-investment (ROI) can a professional, engineering-class driving simulator provide?" The short answer to that is "a significant ROI."
Introducing Driver-In-the-Loop
One major cost component in any automotive development project is prototype vehicle road testing, wherein each drivable prototype vehicle might itself cost as much as a capable turn-key driving simulator. The increasing complexity of automotive systems such as on-board electronics creates thousands of failsafe and tuning parameters. To cover all possible cases, vehicle constructors might apply design of experiments (DOE) methodologies to Electronic Control Units (ECU) tuning and run as many as ten thousand off-line simulations (in a modest case) in order to boil things down to the few hundred-or-so candidates for testing in actual vehicles. Unfortunately, that may still be too many candidates to practically test at proving grounds facilities, as there may simply not be enough time and/or prototype vehicle availability and/or budget allocation to do it all.
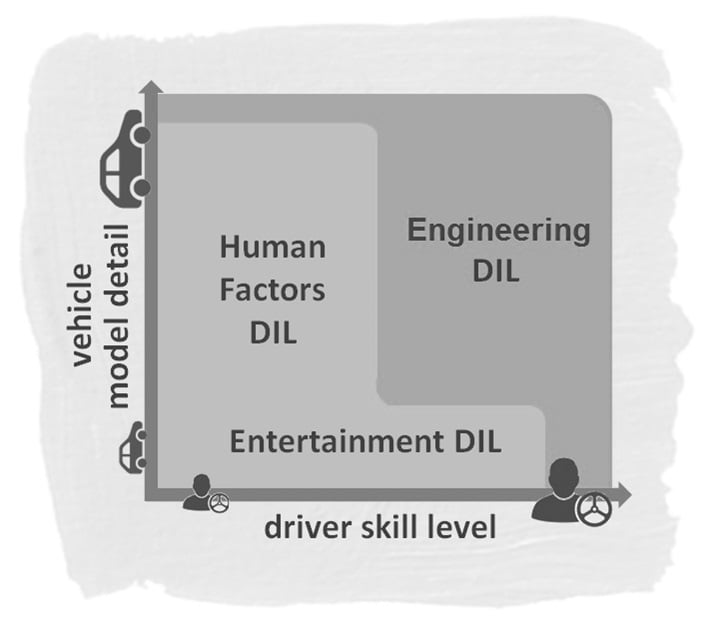
One solution is to inject Driver-in-the-Loop (DIL) simulations into the development process prior to, or in parallel with, road/track testing and standard Software-in-the-Loop (SIL) simulation activities. This offers the possibility of reducing those hundreds of test candidates by an order of magnitude. And herein lies the potential for ROI from DIL simulation: Not only can there be direct efficiency improvements in prototype vehicle testing, but human drivers (the ultimate customer) can accumulate more contact hours with embedded systems as they are developed. Accomplishing this requires an appropriately specified and capable DIL simulator, of course – one that can effectively engage a professional driver who is qualified to provide subjective feedback and be used as a real development tool.
DIL architecture for ROI
Unfortunately, many dynamic DIL simulators, including the aforementioned traditional hexapod-based simulators, are simply not up to task. So some careful consideration of fundamental simulator architecture and technology is required if the promise of ROI is to be fulfilled. At the risk of oversimplifying, it is of primary importance to seek a DIL simulator with the lowest possible system latencies – the measureable delays between computational demands and physical realisations in the simulator (in the form of mechanical motions, graphics rendering and display, and so on). Minimal system latencies and correct driver stimulations (cued feedbacks) are crucial for professional drivers and expert subjective evaluators if they hope to immerse themselves in true virtual proving ground experiences, and drive as they would in real vehicles.
Utilisation of high-performance, low-latency DIL simulation architecture not only increases the productivity of driving simulators within a vehicle development programme, but it is, in fact, mission critical, one of the cornerstones for ROI realisation. After all, what is the real “value” of adding measurable margin to a vehicle development programme? Adding margin that can be used in any way that is needed – to increase the efficiency and effectiveness of prototype vehicle testing, to pursue excellence in refining vehicle performance rather than accepting mediocrity, to head off future warranty claims via comprehensive vetting of complex systems, or to reduce the time to market for new product - might be deemed quite valuable indeed.
To learn more about the advantages of high-performance, low-latency DIL driving simulation, download our FREE eBook, Looking down the road: Harnessing the benefits of driving simulator technology.