The acronym, CASE, refers to new developments in Connected, Autonomous, Shared and Electric vehicles, and there is no question that technological advances in all these areas are reshaping the concept of the automobile.
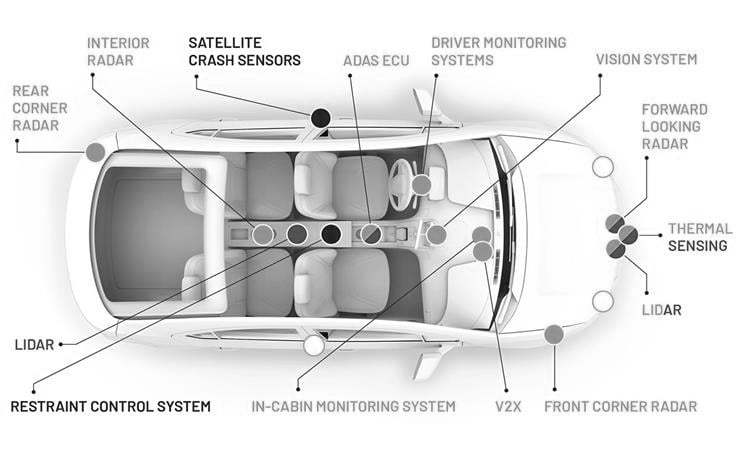
As we touched upon in a previous article, titled ADAS Sensors and Beyond, vehicle manufacturers worldwide are now faced with development challenges that extend well beyond the ordinary. In addition to the usual concerns of proving out system performance, robustness, and reliability, OEMs in CASE space must now examine and understand the complexities of human behavioural interactions with myriad on-board systems, functions and alerts.
Certain questions arise for vehicle manufacturers. Can drivers/occupants of CASE vehicles be expected to contribute vigilance and skill on a part-time basis? How many physical tests are required, and of what types, in order to sign-off CASE vehicles?
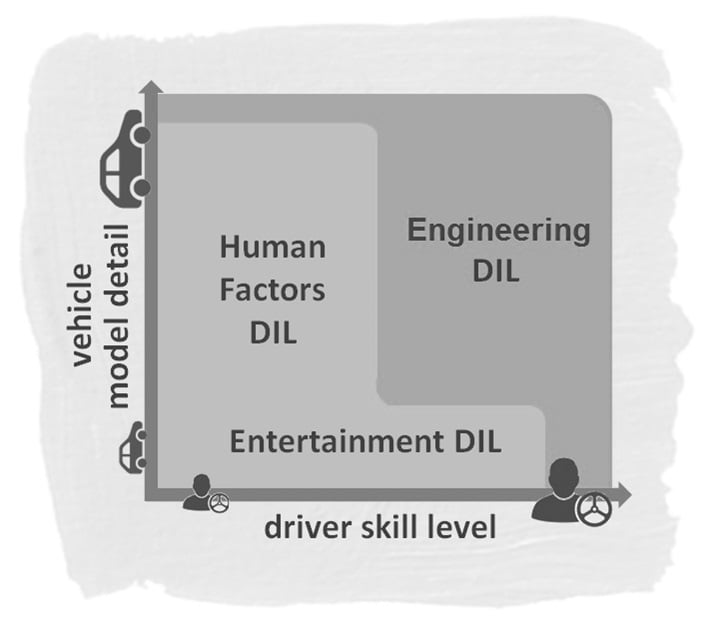
The approach to CASE vehicle sign-offs has less to do with physical testing than we might imagine. Simulation, which already contributes to vehicle research and development activities, can occur in advance of any metal being cut – meaning in advance of any physical prototypes. With Driver-in-the-Loop (DIL) simulation, as shown in the below video, real human interactions can also be included in simulations. In the case of CASE, human behavioural involvement is crucial.
Let's take a brief look at the four vehicle categories in CASE, and touch upon ways in which simulation – particularly Driver-in-the-Loop simulation – can help support developing these vehicles and their supporting technologies.
Connected Vehicles
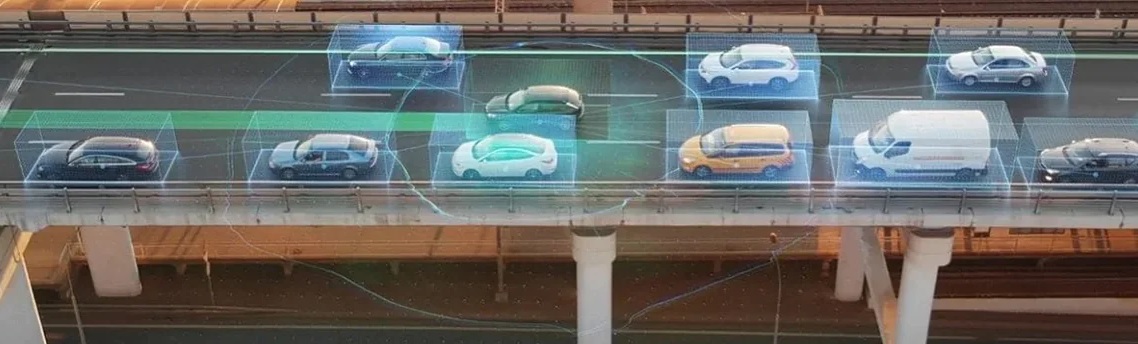
Thanks to publicised paradigms such as the Internet of Things (IoT), it’s not difficult to imagine swarms of vehicles equipped with live, robust high-speed Internet connections, that enable them to communicate with other vehicles (V2V), infrastructure (V2I) and, well, nearly anything (V2X). If such vehicles come to exist, they will be, by definition, connected vehicles. If we pause to think about how significantly connections-to-the-internet have transformed mobile phones into “smart phones,” we might also pause to imagine what V2X might do to cars.
In a previous article, titled 3 Considerations for Connected Cars, we covered in detail some of the edge vehicle testing cases relevant to connected vehicles. They may not be as obvious as the edge cases for the other CASE vehicle categories below, but these cases are very important considerations for OEMs: Preserving brand identity; Avoiding “silo syndrome,” where individual subsystems are developed in isolation; and interrogating marketplace acceptance to offset investment risks.
OEMs use every tool at their disposal to explore these and other edge cases (such as driver distraction, driver monitoring, etc.). Because Driver-in-the-Loop simulators have the ability to connect real people with imagined systems and situations, it’s common to see them employed in connected vehicle development programmes.
Autonomous Vehicles
With autonomous vehicles at any Level (0-5) – meaning vehicles that do not require a full-time human operator – the edge cases are more clearly envisioned, and it’s clear that they make up a relatively large portion of any performance or scenario map. After all, it’s quite easy to imagine a self-driving car driving itself into, well, all sorts of potentially dangerous situations.
A single helium balloon floats gently across a roadway. What does an autonomous car’s sensor array and AI logic calculate it to be? Is it a harmless, lightweight anomaly that can be safely ignored? Or is it a person, thus requiring immediate and drastic evasive manoeuvres? If evasive action is required, what is the goal? To preserve the life of the person crossing the roadway, or to preserve the lives of the vehicle occupant(s)?
Some thought leaders propose regimented AI training out in the wild, wherein millions upon millions of real-world test miles must be accumulated. Others are steadfastly against this approach, termed public shadow driving, and instead assert that AI training must occur more responsibly, through a combination of off-line and DIL simulation and systems engineering that adheres to an end-state scenario matrix. In either case, AI learning, like any other type of real learning occurs by exposure to edge cases containing mistakes as well as successes.
Simulation seems to be a natural fit for this type of AI learning, not only because it’s inherently safer, but because OEMs can intentionally script their edge case scenarios rather than wait for them to occur unexpectedly. With Driver-in-the-Loop experiments, the "Driver" might, in fact, be an AI algorithm in some cases, while in other cases realistic human behaviours can be monitored in parallel with real-time vehicle data in support of AI learning.
Shared Vehicles
Shared vehicles are alternatives to both car ownership and car rental, wherein users might be able to access usage time from a network of available vehicles via a subscription plan. Having a number of different people using the same vehicle is not a revolutionary concept. In fact, it’s been around for over 70 years.
However, there is a new twist. The presence of on-board reconfigurable HMI software and the internet – whether or not we’re considering connected vehicles – are game changers for the scope and scale of the shared vehicle concept. Vehicles, which we traditionally think of as rather indelible machines, become rather plastic in shared situations, bending their character to accommodate pools of users (termed “touchpoints” in shared vehicle speak). Edge testing and development cases for shared vehicles adds hundreds of layers of human-machine interactions on top of already-thick vehicle development programmes. Essentially, there are many more vehicle tuning parameters than usual.
Robust and effective testing to support share-targeted vehicles (and their associated systems) would be nearly impossible without operating Driver-in-the-Loop simulation programmes in the background to churn out all the required experiments – and/or to sensibly limit them.
Electric Vehicles
Perhaps the oldest “new” automotive idea (electric vehicles existed long before their ICE cousins), electric vehicles (EVs) are driving much of automotive development today. Pun intended.
There’s not much explanation required to define electric cars’ space within CASE. It’s simply down to the vehicle propulsion system being a different animal. There’s nothing subtle about it. However, the edge testing in this CASE vehicle category is subtle indeed. Most of this subtlety revolves around human expectations and behaviours.
OEMs have the burden of introducing electric vehicles, with their noticeably different performance profiles, into a marketplace with legacy expectations about how cars are supposed to feel. This video is a good example. In it, Ford engineers describe using their DIL simulator to help develop the Mustang Mach-E. They describe it being largely an exercise in getting the feeling right in the face of certain expectations. Presumably, they were exploring many edges in developing this particular vehicle in order to ensure marketplace acceptance.
A good example of interesting human interactions and behaviours with EVs has to do with edge cases in powertrain development. Monitoring the throttle activity of real people in a Driver-in-the-Loop simulator lab while they are “test driving” under different simulated load, road and environmental conditions can lead to findings that directly impact energy management strategies. And when these impacts are realised early in a vehicle development programme, it translates directly into significant cost savings.
Open Case
As DIL simulator providers, we are fundamentally interested in how people interact with vehicles. What type of information do humans need to have in their interactions with CASE vehicles? Are there important audio, visual, and motion cues that inform and influence human behaviours? What edges need to be explored in order to develop safer, better vehicles?
Because we develop Driver-in-the-Loop simulators for vehicle product development work, we understand the necessity and utility of delivering controlled, repeatable virtual test drive experiences. Because we mix the virtual world with the real world, we have the advantage of always being safe – meaning we’re always able to assist with work on the edge and beyond.
To learn more about how engineering class Driver-in-the-Loop (DIL) simulators are being used in vehicle developments, download our FREE eBook: Looking down the road: Harnessing the benefits of simulator technology.