4 min read
Driver-in-the-Loop Simulators: Who's the Driver?
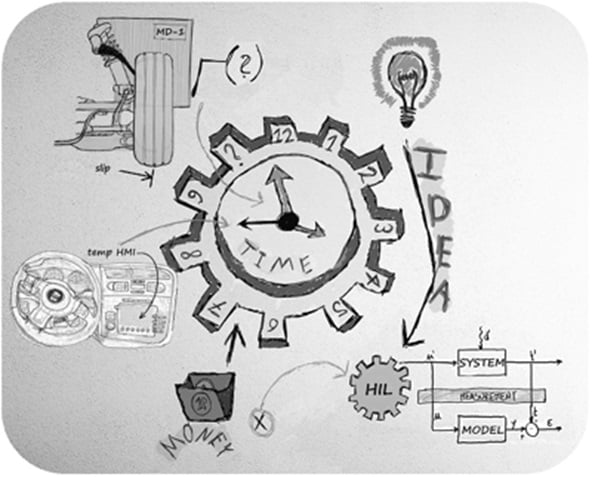
Historically speaking, driving simulators have always attempted to connect real people with imaginary vehicles. The fundamental principle is not new. But the technology used to make this happen is ...