3 min read
Human Interactions with Active Safety Systems and Self-Driving Cars
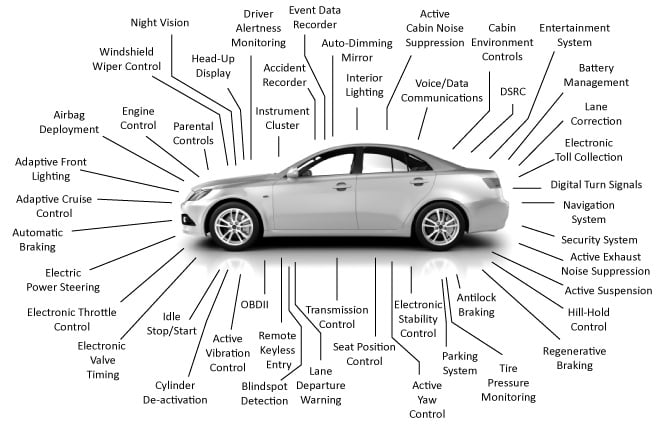
Active safety has been a key topic in the automotive industry for more than 40 years. Since the first Anti-lock Braking Systems (ABS) were introduced in the late 1970s, there has been increasing ...