3 min read
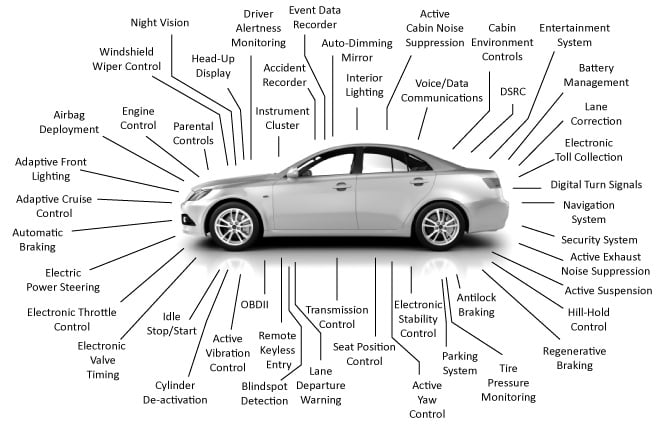
Testing vehicle sensors using HIL and DIL simulation
During on-board systems development programs, it is sometimes necessary to connect real sensor hardware to simulated environments, allowing information exchange to/from virtual worlds. This is ...