3 min read
Virtual Sign-offs for On-board Vehicle Systems
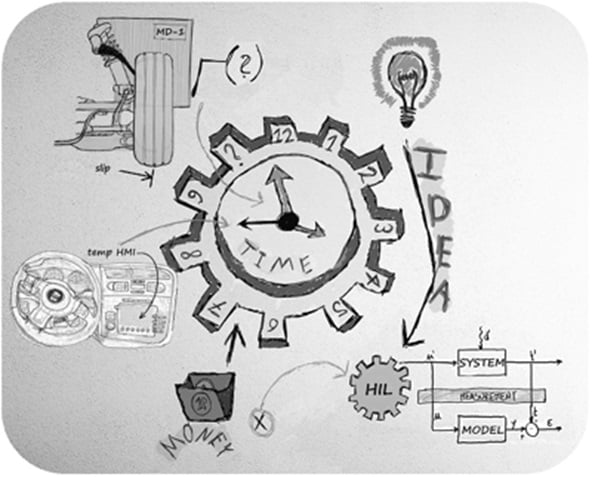
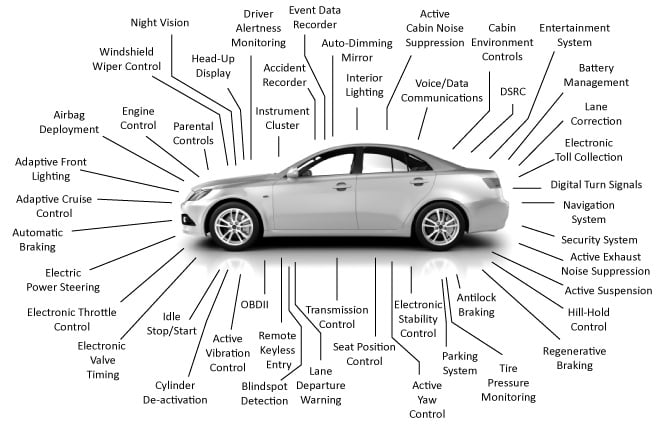
Modern vehicles are equipped with a startling amount of on-board computer processing technology. Perhaps this is because we, as consumers, have come to expect cars to be something more than ...
Virtual Proving Ground, Vehicle Engineering, ADAS Validation